

















 Copy Link
Copy Link Share on X
Share on X Share on Facebook
Share on Facebook Share on LinkedIn
Share on LinkedIn

Always Active
Required for core functionality such as security, network management, and accessibility. These cannot be disabled.
Build intelligent AI systems that automate decisions, accelerate innovation, and scale business growth.
Design, build, modernize, and scale digital products that drive business growth.
Build secure, scalable, and intelligent platforms that power modern enterprises.
Build intelligent, connected, and autonomous systems that operate in the real world.
Flexible engineering capacity with predictable delivery, ownership, and outcomes.
Uncover the transformative potential of digital and mobile solutions for your industry

 Last Updated: Jul 17, 2026
Jun 10, 2026
Last Updated: Jul 17, 2026
Jun 10, 2026  302
302  21 min. Read
21 min. Read


Key Takeaways
A technical deep dive into edge computing, MQTT, Apache Kafka, stream processing, and the distributed systems powering the world’s most connected fleet.
Picture this: you’re sitting in a café in New York. Your Tesla is parked three kilometers away. You open the app, tap “Unlock,” and within two seconds your car responds: Door handle extended, cabin lights on.

Elon Musk with a Tesla car (Source)
That two-second interaction is deceptively simple, like a child’s play!
But behind it is one of the most sophisticated real-time IoT architectures ever built for a consumer product.
Your unlock command traversed a 4G cellular network, authenticated through OAuth 2.0, was routed through Apache Kafka, delivered to your vehicle via MQTT, validated by an onboard microcontroller, and acknowledged back to your phone, all faster than you finished reading this sentence.
Now multiply that by millions. Across the world.
As of 2025, Tesla operates a fleet exceeding five million vehicles globally.
Each vehicle pings Tesla’s servers approximately every ten seconds with telemetry data. During peak hours, that translates to over 500,000 simultaneous connections.
Daily, Tesla’s infrastructure processes terabytes of telemetry: Battery state, GPS coordinates, braking events, motor current, driver behavior, climate system status, and camera-derived object detection summaries. This volume arrives continuously, not in batches.
The engineering challenge is not merely storing this data. It is processing it in real time, routing commands in under two seconds, detecting brake anomalies before they become accidents, balancing energy grids across thousands of Powerwalls, and deploying over-the-air software updates to millions of vehicles, without a single unplanned downtime.
Incredible, isn’t it?
This blog breaks down exactly how Tesla built that system: from the edge hardware inside every car, through the connectivity protocols that keep vehicles online, into the cloud ingestion and stream processing layers, and finally through the app-to-vehicle command pipeline that makes it all feel effortless.
Most enterprise software serves users who sit still.
A banking app handles requests when someone logs in. An e-commerce platform handles spikes during sales.
But here, we are dealing with moving cars.
Tesla’s infrastructure has no quiet period. Vehicles drive continuously, globally, across time zones, and each one is an active IoT node transmitting data regardless of whether the owner is interacting with the app.
The numbers establish the scale clearly.
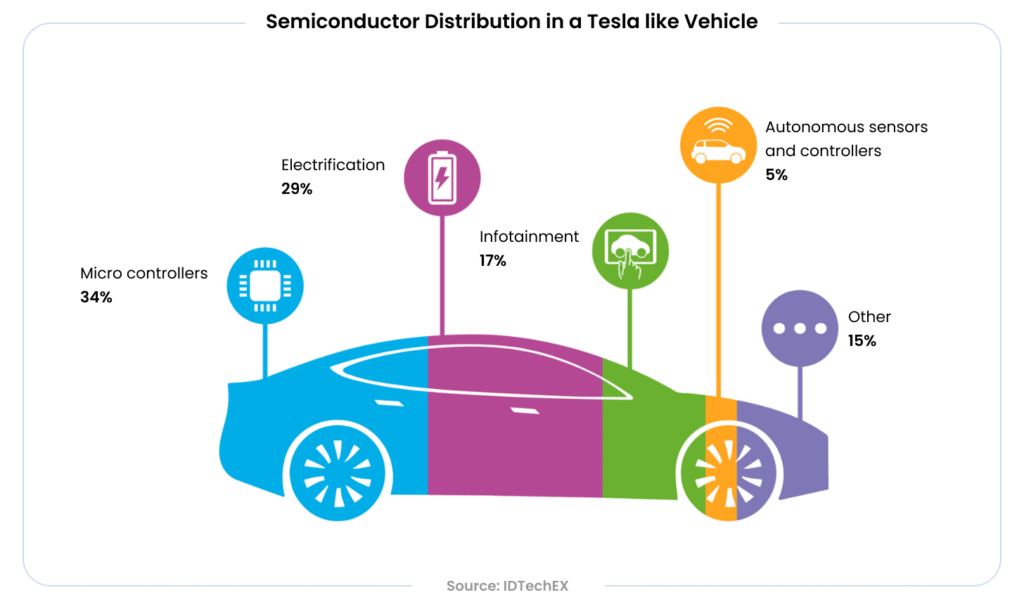
Software Distribution in Tesla like Car (Source)
Five million vehicles generating a telemetry ping every ten seconds produces 500,000 pings per minute just from a 10% active fleet fraction.
At full scale during peak hours, the write throughput requirement runs into the millions of events per minute.
Cassandra and DynamoDB, the distributed databases Tesla’s architecture relies on, are specifically chosen for this: both are engineered for high write throughput across distributed nodes, with DynamoDB offering point-in-time recovery and on-demand billing to handle unpredictable demand surges.
Three core tensions define this challenge.
First, latency versus reliability.
Critical commands such as unlock, charge initiation, climate control, need sub-two-second end-to-end latency.
Telemetry data, by contrast, can tolerate slightly higher latency but must be durable: No event can be lost.
These competing requirements demand a tiered architecture: a fast lane for commands, a durable lane for bulk telemetry.
Second, write throughput.
Traditional relational databases cannot handle millions of concurrent writes without significant engineering overhead.
Tesla’s solution routes telemetry through Apache Kafka, which functions not as a simple message queue but as a distributed streaming platform, that too, before landing data in Cassandra or DynamoDB.
Kafka absorbs ingestion spikes and decouples producers (vehicles) from consumers (analytics pipelines, ML systems, monitoring services).
Third, zero downtime during fleet-wide events.
Over-the-air (OTA) update deployments to five million vehicles represent one of the most operationally complex events in software delivery.
Tesla uses canary deployments, rolling out updates to roughly 1% of the fleet before broader distribution, combined with circuit breakers (Hystrix) that halt cascading failures if update-related issues begin propagating.
Batch processing architectures simply cannot serve these requirements. Grid balancing for energy platforms, real-time brake failure detection, and live navigation data all require event-by-event processing. The architecture is designed from the ground up around streaming, not batch.
Before data ever reaches Tesla’s cloud, the vehicle itself performs substantial processing.
Each Tesla is effectively a rolling IoT device with a layered compute architecture that would be impressive in a fixed data center, let alone a moving vehicle.
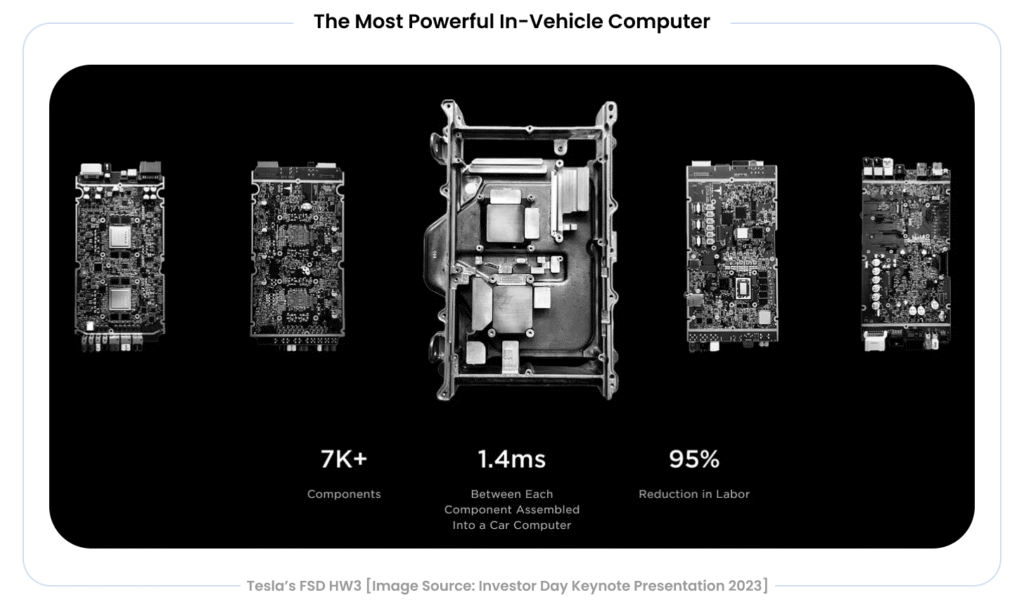
The Full Self-Driving (FSD) computer is the neural engine of Tesla’s edge processing.
Built around dual system-on-chip configurations, pairing an Exynos ARM Cortex-A72 with Tesla’s custom SoC 2 or SoC 3, the FSD chip delivers 2,300 frames per second of neural network processing, a 21× improvement over the preceding Hardware 2.5 architecture. Custom neural network accelerators handle object detection, path planning, and real-time scene classification.
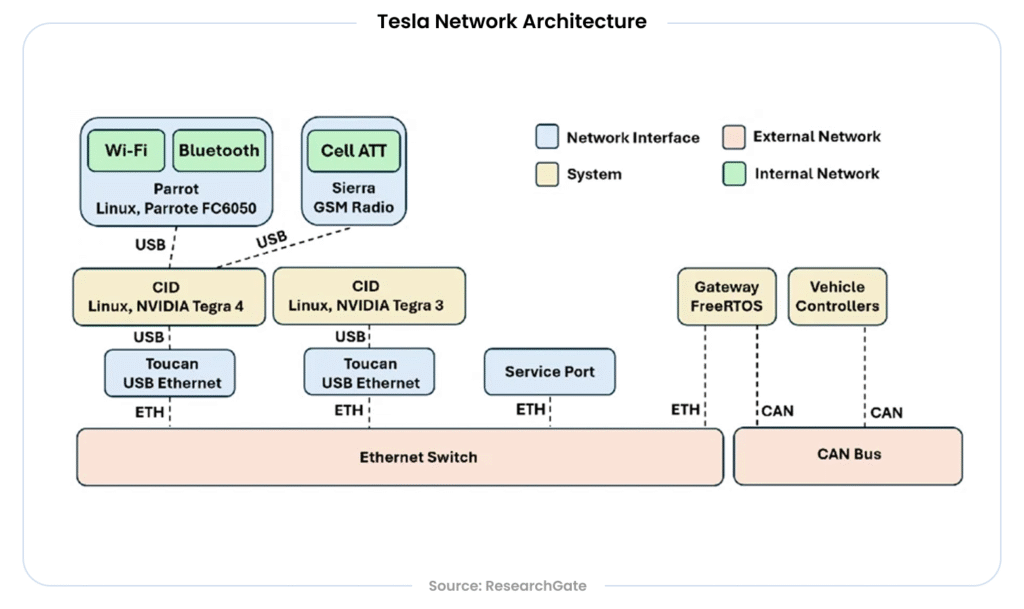
Tesla Network Architecture (Source)
Critically, the FSD chip does not send raw camera feeds to the cloud.
It runs inference locally, identifying stop signs, reading lane markings, classifying pedestrians, and transmits only structured summaries, compressed features, and exception events.
This edge-first strategy dramatically reduces uplink bandwidth requirements. Raw video is captured and buffered locally during certain events (collision precursors, autopilot disengagements) and uploaded opportunistically over WiFi when the vehicle is parked.
The Media Control Unit (MCU) sits alongside the FSD computer as the vehicle’s second major compute component. Powered by an AMD Ryzen processor with a Radeon GPU, the MCU manages infotainment, vehicle control interfaces, and the display graphics stack.
It communicates with the FSD computer via high-speed internal Ethernet, forming a tightly coupled dual-compute architecture. In Hardware 4 (HW4) vehicles, this design achieves a redundancy tier that allows one SoC to monitor the other for fault detection.
An onboard SSD cache stores event logs and telemetry before offloading to cloud infrastructure. This buffer is critical for network resilience. When a vehicle passes through a tunnel, enters a parking garage, or experiences 4G dead zones, data accumulates locally rather than being lost. Once connectivity restores, the vehicle uploads buffered data in order. This ensures no telemetry event is silently dropped.
Tesla uses a layered internal network architecture. High-speed Ethernet carries traffic between the FSD computer, the gateway module, and motor controllers, the highest-bandwidth paths in the vehicle. The CAN (Controller Area Network) protocol handles legacy subsystems and ECUs, while LIN protocol manages low-speed sensors. In Cybertruck, Tesla introduced Etherloop, a proprietary second-generation Ethernet protocol, optimized for the vehicle’s updated electrical architecture. Additionally, patent US11539638B2 describes Tesla’s use of TDMA (Time Division Multiple Access) over power lines for shared-medium communication within the vehicle, a protocol innovation that reduces wiring complexity.
Every Tesla ships with a 4G modem incorporating a GNSS module and eSIM. The vehicle maintains a persistent internet connection across 3G, 4G, WiFi, and Bluetooth. GPS and gyroscope data are fused onboard for real-time location accuracy. Basic cloud connectivity and remote commands operate across all trims; Premium Connectivity adds streaming navigation, satellite imagery, and music streaming over the cellular link.
The edge layer continuously produces several categories of data: telemetry (speed, acceleration, location, braking force, battery state of charge), video feeds from eight cameras used for object detection training, sensor data from radar and IMU, event logs covering warnings and driver inputs, OTA update feedback, energy consumption metrics (motor current, pack temperature, charge status), and driver preference profiles including seating position and driving style settings.
With data generated at the edge, the next challenge is transmission: how does a moving vehicle maintain reliable, low-latency communication with cloud infrastructure across variable network conditions?
MQTT (Message Queuing Telemetry Transport) is the primary protocol for vehicle-to-cloud telemetry and command delivery. Designed for unreliable networks, MQTT operates over a publish-subscribe model where vehicles publish telemetry to topics and subscribe to command channels. The protocol’s minimal header overhead makes it significantly lighter than HTTP for continuous data streams.
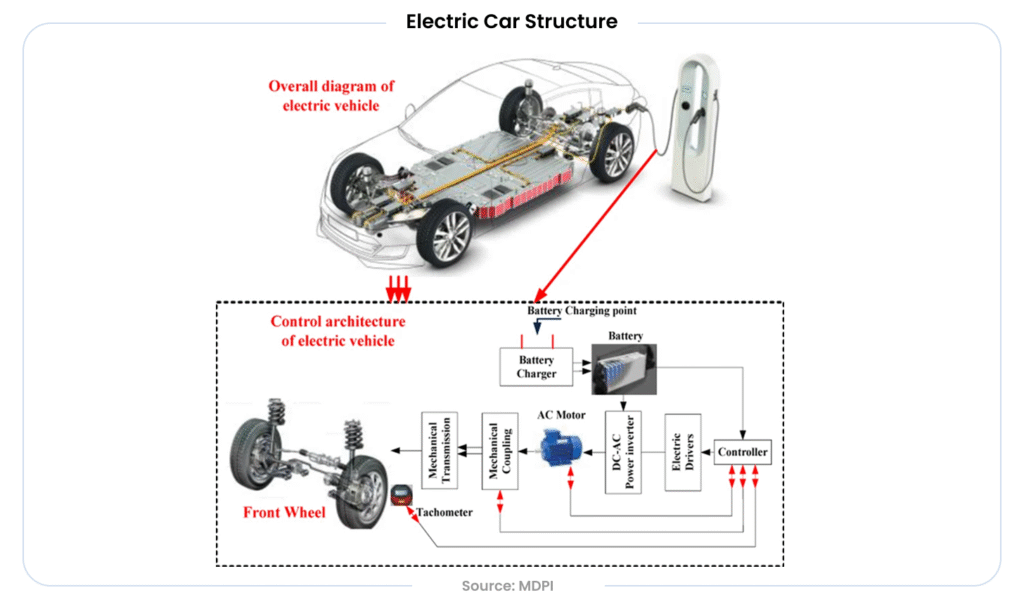
Electric Car Structure (Source)
Built-in Quality of Service (QoS) levels allow Tesla to differentiate between at-most-once delivery for high-frequency telemetry (where a lost packet is acceptable) and at-least-once delivery for commands (where reliability is critical). Every MQTT session runs over TLS/SSL encryption, with tokenized vehicle IDs replacing plain-text identifiers.
This protocol is particularly well-suited to automotive use: when a vehicle enters a tunnel and loses connectivity, MQTT’s session persistence and reconnection logic ensure that commands and state updates are not permanently lost.
For lower-latency application-layer communication, Tesla’s architecture incorporates gRPC, a high-performance RPC framework built on HTTP/2 and Protocol Buffers. gRPC is used for scenarios requiring structured, typed data exchange at ultra-low latency between vehicle and cloud services.
WebSockets power last-mile connectivity for Powerwall energy systems and the Tesla app’s real-time data feeds. Unlike HTTP, WebSocket connections remain open bidirectionally, allowing the server to push state updates to the app without the client needing to poll. This is what enables the app to show real-time charge percentage changes without the user manually refreshing.
Tesla provides an open-source server reference implementation for Fleet Telemetry, a WebSocket-based protocol that allows authorized developers to receive configurable telemetry records directly from vehicles. The protocol supports acknowledgment, error reporting, and rate-limit responses.
This architecture powers Tesla’s third-party developer ecosystem while keeping Tesla’s core telemetry pipeline on its own infrastructure.
Tesla has developed proprietary protocols for specific internal use cases. TTPoE (Tesla Transport Protocol over Ethernet) replaces TCP for communications within the Dojo supercomputer cluster, reducing latency for the massive GPU-to-GPU communication workloads involved in Autopilot model training. Etherloop, deployed in Cybertruck, is Tesla’s custom protocol layered over Ethernet within the vehicle’s internal network.
The Tesla app’s v4.51.5 update introduced AI-powered real-time car location tracking, a practical demonstration of the connectivity architecture in action. The feature fuses smartphone gyroscope data, GPS coordinates, and vehicle telemetry to display the car’s precise position and orientation on the app map as it moves.
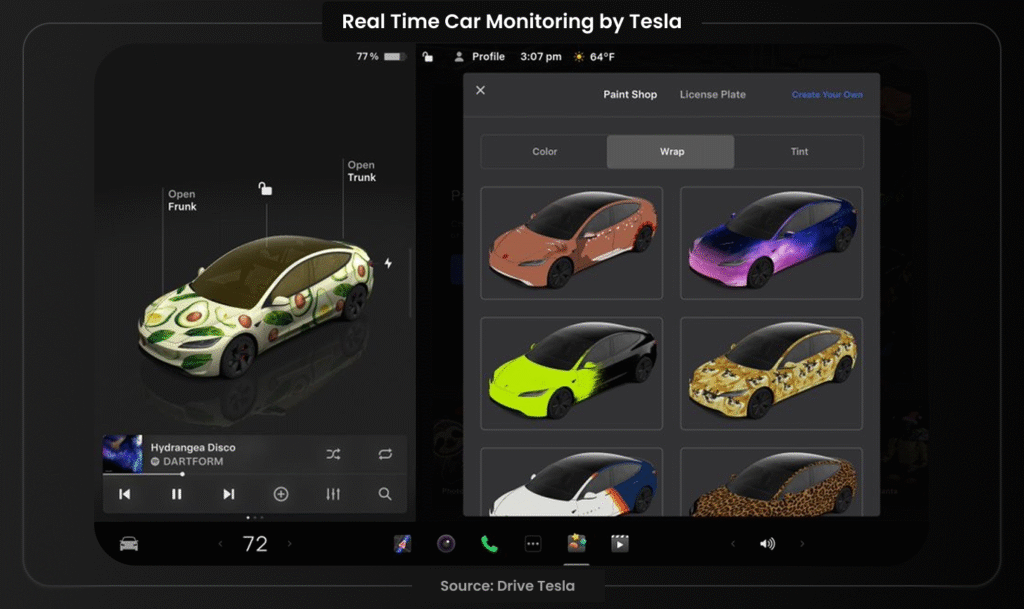
Real Time Car Monitoring by Tesla (Source)
This requires a continuous WebSocket stream of vehicle state, sub-second latency, and client-side sensor fusion, a system that works only because the persistent 4G connection and low-overhead protocol stack can sustain it.
Once telemetry leaves the vehicle, it enters Tesla’s cloud ingestion pipeline. At this layer, the imperative is absorbing millions of concurrent event streams without data loss, while making data available for downstream consumers, analytics, ML pipelines, operational monitoring, and the app itself, in near real time.
Apache Kafka is the documented centerpiece of Tesla’s cloud ingestion architecture. By 2018, Tesla was processing trillions of IoT messages daily through Kafka, a figure that has only grown with fleet expansion.
Kafka functions not as a traditional message queue but as a durable, distributed log: events written to Kafka topics are retained and replayable, which is critical for fault tolerance and for feeding downstream systems at different consumption rates.
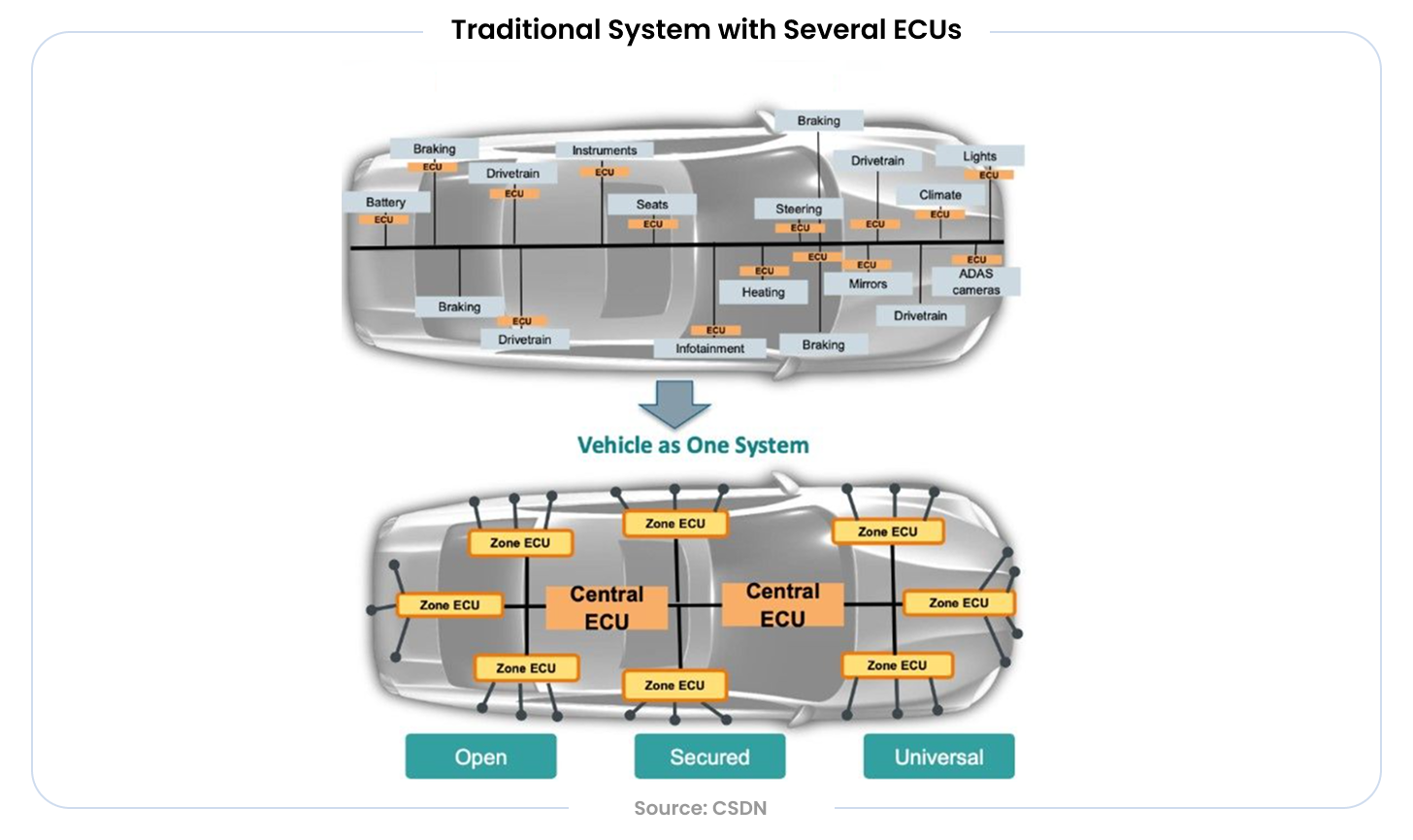
Electronic Control Units Compared (Source)
Tesla’s Kafka deployment is organized around specialized topics: telemetry streams, diagnostic logs, charging events, OTA feedback, GPS coordinates, and command acknowledgments. Each topic is partitioned for parallelism, allowing multiple consumer groups to read from the same stream simultaneously.
For managed cloud infrastructure, architectures similar to AWS MSK (Managed Streaming for Kafka) provide three-broker cluster configurations for high throughput, deployed within a VPC with security groups for isolation. This approach enables tables for vehicles, trips, alerts, drivers, commands, geofences, and signal catalogs, the full operational dataset for a connected fleet.
Not all data has equal urgency.
Tesla’s ingestion architecture implements a tiered partitioning approach. A fast lane processes critical commands, unlock requests, charging starts, emergency responses, with minimal queuing delay. A slow lane handles bulk telemetry, historical logs, and video upload events, where higher latency is acceptable but durability is paramount. This prevents high-frequency sensor data from creating backpressure that delays user-facing commands.
Downstream of Kafka, Tesla uses Cassandra for high-throughput time-series telemetry storage. Cassandra’s architecture is particularly suited to this workload: it writes to multiple nodes in parallel, handles millions of writes per second without a single-node bottleneck, and supports the time-series access patterns (range queries by vehicle ID and timestamp) that analytics pipelines require. DynamoDB supplements this for command tracking and event logs where AWS-native integration, on-demand scaling, and point-in-time recovery are priorities.
Across Tesla’s operational layer, ElastiCache for Redis maintains the real-time state of each vehicle, current battery percentage, charging status, location, software version, active faults. Redis is an in-memory key-value store capable of sub-millisecond lookups. When you open the Tesla app and see “Charging: 87%,” that value is retrieved from Redis, not from a database query against historical telemetry.
The Redis layer enables the app to feel instantaneous even as the underlying telemetry pipeline ingests millions of events per second.
A core architectural principle in Tesla’s pipeline is filtering and structuring data at the source, at the vehicle edge, rather than in the cloud. By the time events arrive at Kafka, they carry structured metadata, normalized formats, and pre-computed features. This reduces the processing burden on cloud infrastructure and enables clean, canonical Kafka topics that every downstream consumer can rely on without per-consumer transformation logic.
Kafka ingestion is the intake valve. Stream processing is the brain. Tesla’s real-time analytics layer continuously evaluates incoming event streams, detects anomalies, triggers alerts, maintains digital twins of vehicles, and feeds machine learning models, all within millisecond windows.
Apache Flink is Tesla’s documented choice for real-time stateful stream processing. Flink processes event streams in sequence, maintaining state across events, a requirement for detecting patterns like brake system anomalies, which involve multiple data points over time rather than a single threshold breach.
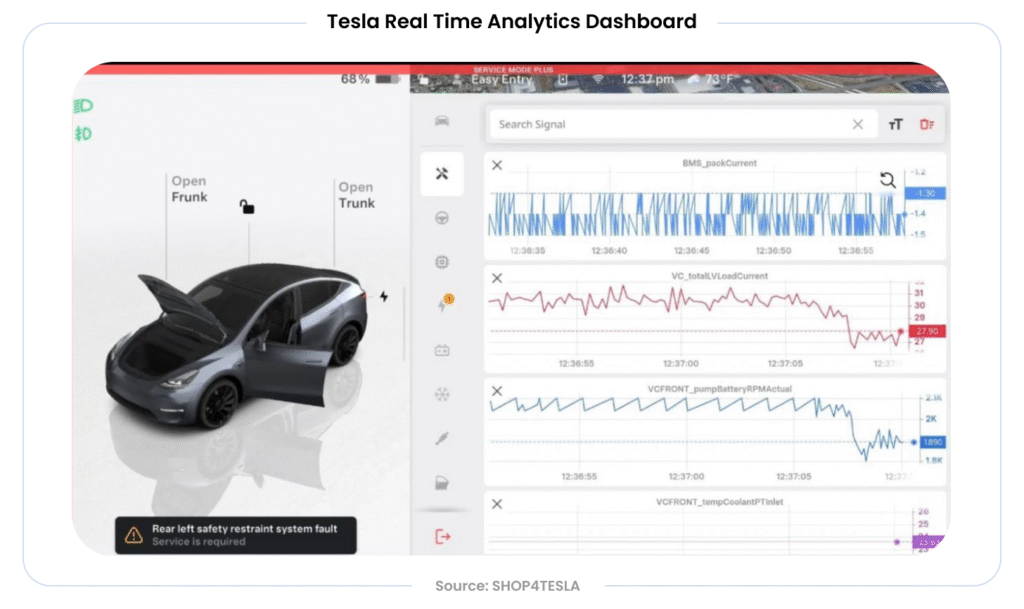
Tesla Real Time Analytics Dashboard (Source)
A brake failure detection pipeline in Flink might correlate braking deceleration data, brake fluid pressure telemetry, and wheel speed sensor readings across a sliding time window to flag a developing fault before the driver notices.
Flink also handles route prediction (fusing GPS, speed, and historical navigation patterns) and OTA update tracking (monitoring which vehicles received, applied, or rolled back a given software version in real time).
While Flink handles event-driven detection, Tesla uses Akka Streams for stateful processing of energy assets: Particularly Powerwall units in its Virtual Power Plant (VPP) deployments.
Akka Streams is built on the Actor Model, which provides fine-grained control over concurrent, stateful streaming workflows. Each Powerwall or vehicle can be represented as a digital twin, a real-time computational model of a physical asset, maintained by an Akka actor that continuously updates its state as telemetry arrives.
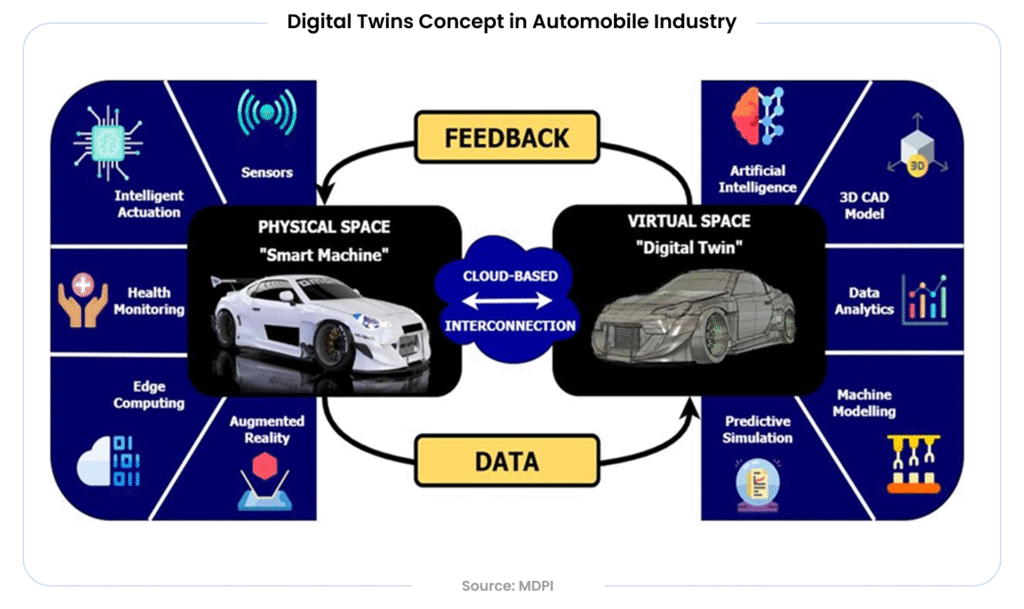
Digital Twins Concept in Automobile Industry (Source)
This is a relatively uncommon architectural choice compared to standard Kafka Streams or Spark Streaming. Tesla’s use of Akka here reflects the requirements of the energy platform: the VPP must model the state of thousands of energy assets simultaneously, respond to grid signals in milliseconds, and coordinate charging and discharging across geographically distributed units.
Kafka Streams or batch-oriented Spark would introduce latency that makes real-time grid balancing infeasible.
The Virtual Power Plant architecture demonstrates why real-time streaming is non-negotiable. Apache Kafka streams telemetry from millions of Powerwalls every second.
The Autobidder platform, Tesla’s automated energy trading software, analyzes this stream in real time, assesses grid demand, and adjusts energy prices and dispatches signals dynamically. WebSockets deliver these dispatch commands to home batteries with millisecond-level latency. A batch-processing architecture operating on hourly or even minute-level aggregations cannot react to grid frequency deviation events that unfold in seconds.
Beyond the central cloud, Tesla deploys regional microservices across AWS and GCP regions. When you unlock your car in Berlin, the command is processed by European infrastructure, not routed to a US data center.
This geographic distribution reduces latency for interactive commands and provides fault isolation: a regional outage does not cascade globally. As 5G and edge computing infrastructure matures, further decentralization of processing toward the vehicle may reduce reliance on centralized backends for latency-sensitive decisions.
The full round-trip for a vehicle command, from user tap to vehicle action to app confirmation, involves seven distinct system layers operating in sequence.
The user taps “Unlock” in the Tesla app. The app immediately sends an HTTPS request to Tesla’s API Gateway, carrying an OAuth 2.0 Bearer token. The API Gateway validates the token against Tesla’s identity service, verifying that the authenticated account has permission to command this specific vehicle. The validated command is written to a Kafka topic designated for vehicle commands, partitioned by vehicle ID.
Tesla’s Computing Power (Source)
A Kafka consumer: Tesla’s command routing service, reads from this topic and publishes the command to the MQTT broker responsible for the vehicle’s region. The MQTT broker delivers the command over the persistent 4G connection to the vehicle.
The MCU receives the command, validates it against a local security check, and actuates the door locks. Simultaneously, the MCU publishes an acknowledgment event back through MQTT, which flows through Kafka to update the Redis vehicle state cache. The app, subscribed to the WebSocket stream for this vehicle’s state, receives the acknowledgment and displays “Unlocked.”
The total elapsed time: typically under two seconds.
Tesla’s third-party developer API uses OAuth 2.0 with standard Client ID and Client Secret credentials. Developers register through Tesla’s developer portal, obtain credentials, and request user authorization.
Access tokens are scoped: a third-party charging app receives only charging-related permissions, not location or camera access. Vehicle owners retain full visibility into which apps hold access and can revoke individual app permissions at any time through the Tesla app.
The Tesla Fleet API exposes endpoint categories covering the full operational scope of the vehicle. Vehicle commands include unlock, lock, honk horn, flash lights, open/close windows, and actuate trunk. Vehicle status endpoints return live battery percentage, charging progress, door state, software version, and fault codes. Charging endpoints allow start/stop and charge limit adjustment.
Climate endpoints pre-condition the cabin to a target temperature before the driver enters. Location endpoints return real-time GPS coordinates and allow sending a navigation destination to the vehicle. Powerwall endpoints expose energy generation, storage, usage, and grid export metrics for Tesla Energy customers.
An architecture coordinating five million connected vehicles is an extraordinarily attractive attack surface. Tesla’s security posture layers hardware, authentication, encryption, and anomaly detection into a defense-in-depth strategy.
Every Tesla stores cryptographic keys in hardware security modules rather than software. This prevents a compromised vehicle from being repurposed as a botnet node, the hardware key cannot be exfiltrated through software exploits.
Tesla’s anomaly detection layer monitors for behavioral signatures consistent with botnet activity, flagging compromised vehicles before they can be used in coordinated attacks.
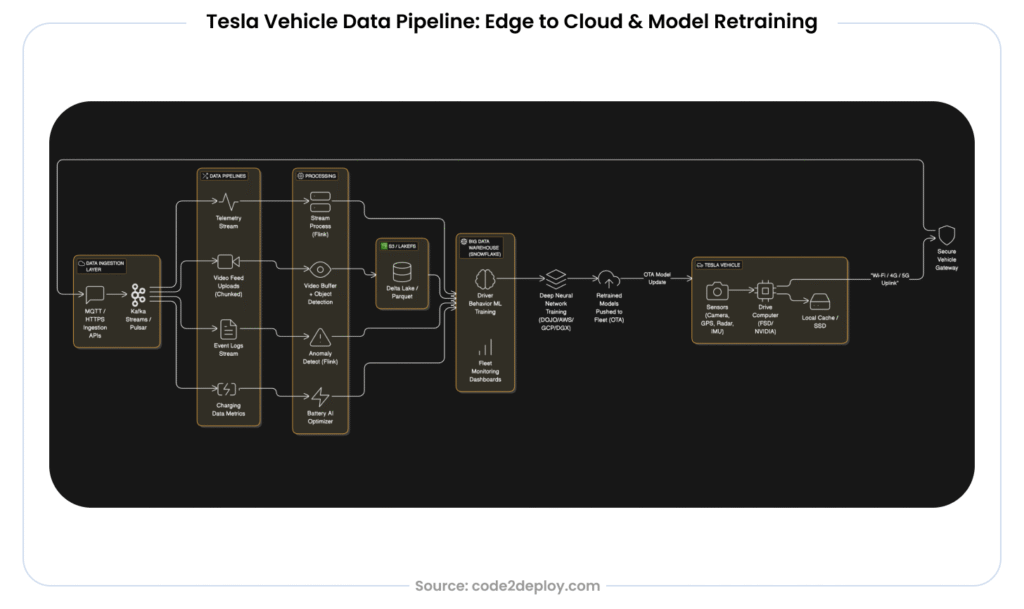
Tesla Data Pipeline (Source)
All API traffic runs over TLS/SSL. Vehicle identifiers in API communications are tokenized, there are no plain-text VINs or account identifiers in transit. OAuth 2.0 scopes limit third-party apps to only the data categories they have explicitly requested and the vehicle owner has approved.
Fleet API terms explicitly prohibit selling user data, and apps may only request data categories strictly necessary for their stated function.
By default, Tesla does not associate vehicle telemetry data with owner identity. Anonymized fleet data is used for Autopilot improvement. If a vehicle owner grants a third-party app access to location data, Tesla’s systems route that data to the app without retaining it in Tesla’s own identity-linked data stores.
The separation between operational telemetry and personally identifiable information is architectural, not merely policy.
OTA update deployments use a canary strategy: a new software version is deployed to approximately 1% of the fleet first. Automated monitoring tracks error rates, crash reports, and sensor failures in the canary group. If anomalies exceed thresholds, deployment halts automatically. If the canary is clean, the rollout proceeds incrementally.
Fallback mechanisms allow individual vehicles to roll back to the previous software version if the new version encounters a vehicle-specific failure.
Circuit breakers, implemented via Hystrix or equivalent patterns, protect the cloud infrastructure from cascading failures.
If a downstream service (for example, a database shard) begins timing out, the circuit breaker opens, returning cached or degraded responses rather than allowing the failure to propagate through dependent services.
Delta OTA updates transmit only changed binary blocks rather than full OS images. For a five-million-vehicle fleet, this compression strategy is essential: full image updates would require vastly more bandwidth, longer update windows, and significantly higher cellular data consumption per vehicle.
Tesla’s IoT architecture is not a single engineering innovation, it is a system of interlocking design decisions, each solving for a different constraint, collectively producing a platform that operates at a scale and reliability that most enterprise software organizations would consider extraordinary.
Edge-first processing means the cloud never receives more data than it needs. MQTT and Kafka form a backbone that absorbs millions of events per second while maintaining the sub-two-second latency that user-facing commands require.
Apache Flink and Akka Streams make millisecond-level decisions about brake health, energy grid balance, and route prediction. Distributed databases handle write throughput that would overwhelm traditional architectures.
Regional microservices ensure a failure in one geography never cascades globally. Hardware-backed cryptographic keys and OAuth 2.0 scoping keep the entire connected surface defensible.
Your car is no longer just a vehicle. It is a real-time data node in a distributed system processing terabytes daily. Every brake input, every charging session, every navigation command contributes to a fleet intelligence layer that improves Autopilot models, predicts maintenance needs, and balances energy grids.
Looking ahead, 5G edge computing may shift more of the stream processing workload closer to the vehicle, reducing reliance on centralized backends for latency-sensitive decisions. Tesla’s planned robotaxi service will layer real-time dispatch coordination on top of this same architecture. And Dojo: Tesla’s custom AI training supercomputer, using the proprietary TTPoE protocol to replace TCP across its compute fabric, will continue processing the petabytes of fleet data needed to advance full autonomy.
The blueprint is already written in the infrastructure. The next chapter is only a software update away.
Your command travels via HTTPS to Tesla’s cloud, then reaches your car through MQTT over a persistent 4G connection.
MQTT’s lightweight publish-subscribe model handles unreliable networks and millions of concurrent connections far more efficiently than HTTP.
The onboard SSD buffers all telemetry locally and uploads it in sequence once connectivity is restored.
Tesla uses canary deployments — rolling updates to 1% of the fleet first — with automated rollback if anomalies are detected.
By default, Tesla does not associate vehicle telemetry with owner identity; location data is anonymized for fleet analytics.
We use cookies to ensure our website functions properly, improve performance, and provide a personalized experience. You can choose which types of cookies to allow below.
Required for core functionality such as security, network management, and accessibility. These cannot be disabled.
Help us understand site traffic and user interactions so we can improve performance and usability.
Enable enhanced functionality and personalization such as language or region preferences.
Used to deliver relevant ads, track campaign performance, and measure advertising effectiveness.